В основе любой функции реверса лежит изменение направления вращения вала или линейного перемещения исполнительного механизма. Конкретная реализация зависит от типа двигателя. В трёхфазных асинхронных машинах как работает реверс объясняется через переключение чередования фаз питающей сети: при коммутации двух любых фаз (например, L1 и L3) магнитное поле статора меняет направление вращения, увлекая за собой ротор. В двигателях постоянного тока и коллекторных машинах направление меняется путём инверсии полярности на якоре или обмотке возбуждения. В современных бесщёточных (BLDC) и серводвигателях реверс управляется программно: контроллер изменяет последовательность коммутации обмоток статора, а датчики положения ротора (энкодеры или Hall-сенсоры) обеспечивают точную синхронизацию. Важно понимать: реверс ≠ экстренное торможение. Это именно смена вектора движения, требующая временной задержки для гашения кинетической энергии и защиты от бросков тока.
Реверс хода vs реверс мощности: в чём разница и почему это важно
В технической документации часто встречаются оба термина, но они описывают разные физические процессы.
Реверс хода — это изменение направления вращения вала или движения механизма (вперёд/назад, по часовой/против
часовой стрелки). Это штатная функция, заложенная в конструкцию привода и управляемая через дискретные или аналоговые сигналы.
Реверс мощности (или генераторный режим) возникает, когда двигатель начинает отдавать энергию
обратно в сеть или на тормозной резистор. Типичный пример: спуск груза в кране или торможение вентилятора по
инерции. В этом случае ЭДС двигателя превышает напряжение сети, и ток меняет направление. Для частотных
преобразователей реверс мощности требует наличия рекуперативного блока или динамического торможения. Игнорирование
этого фактора приводит к срабатыванию защиты по перенапряжению звена постоянного тока (код ошибки OU/OV).
Обратный реверс: разбираемся в терминологии и типичных ошибках
Выражение «обратный реверс» технически является плеоназмом, так как реверс уже подразумевает обратное направление.
Однако в среде монтажников, операторов и проектантов этот термин часто используется для обозначения:
- Возврата в исходное положение после выполнения реверсивного цикла;
- Аварийного отключения реверса с принудительным возвратом в нейтраль;
- Дублирующей цепи управления (резервный реверс).
При проектировании схем важно избегать путаницы: в проектной документации используйте строгие формулировки «реверс
хода», «возврат в нулевое положение» или «резервное управление направлением». Это исключит ошибки при
программировании ПЛК и наладке щитов управления.
Реверс на частотнике: программная реализация и ключевые параметры
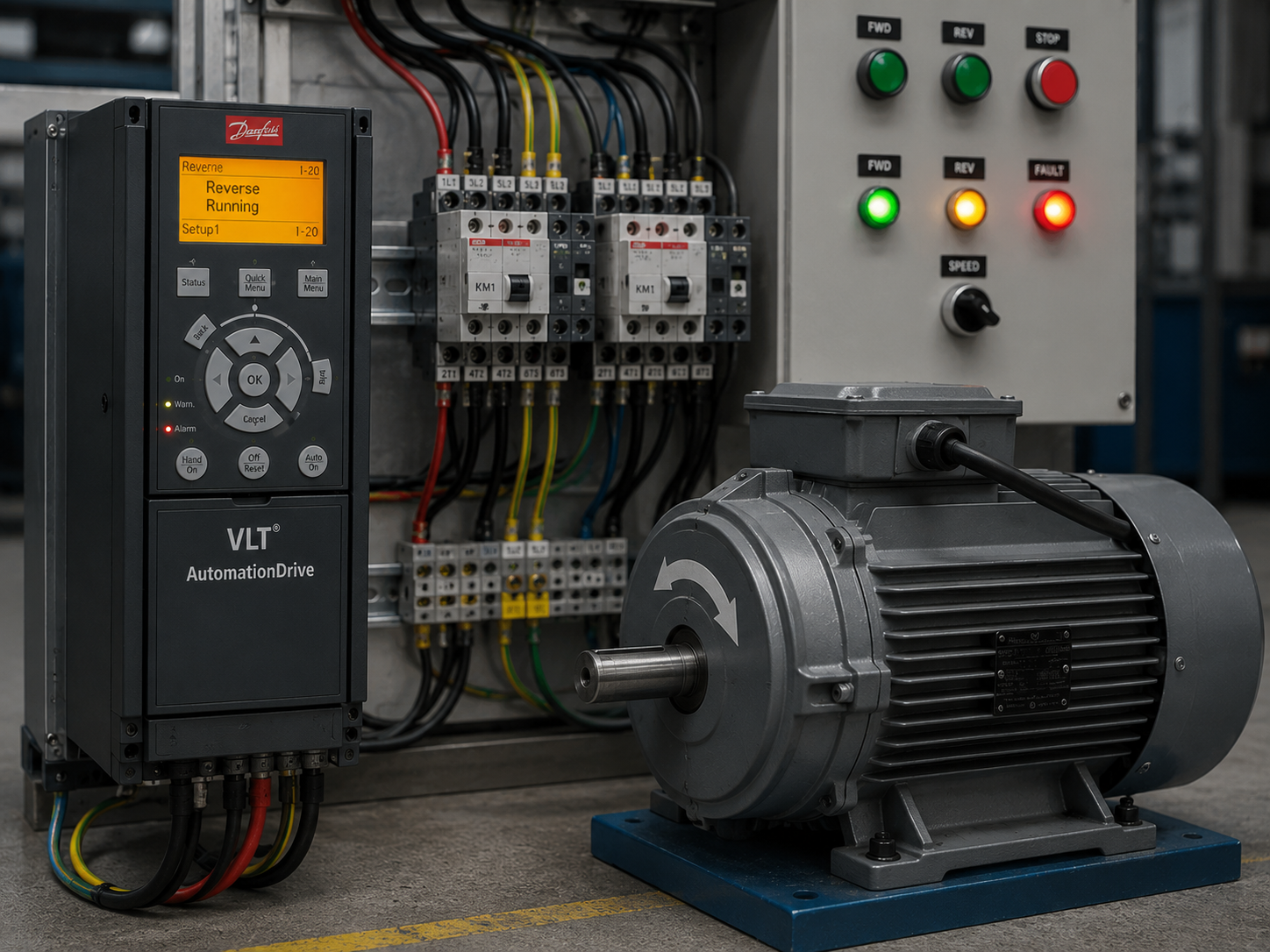
Современные ПЧ реализуют функцию переключения направления без механических контакторов. Как работает реверс на
частотном преобразователе, а именно настраивается через внутренние параметры и внешние дискретные входы. Типовая схема: DI1 = «Пуск вперёд», DI2 = «Пуск назад», DI3 = «Стоп». В меню преобразователя необходимо задать:
- Direction Reverse (разрешение обратного вращения);
- Acceleration/Deceleration Time Reverse (время разгона/торможения в обратную сторону, часто
настраивается отдельно); - DC Injection Braking (время и ток подмагничивания перед сменой направления);
- Reverse Interlock (аппаратная или программная блокировка от одновременной подачи команд «вперёд» и «назад»).
При работе с инерционными нагрузками обязательно активируйте функцию «торможение перед реверсом». Без неё
переключение под нагрузкой вызовет перегрузку по току (OC) или механический удар по редуктору.
Торможение перед реверсом: DC-инжекция, динамическое и рекуперативное
Безопасный переход требует полной остановки вала или контролируемого снижения скорости. Преобразователь частоты предлагают
три основных метода:
- Свободный выбег (Coast to stop) — отключение питания, вал останавливается инерционно. Подходит
только для маломощных приводов без требования к точности. - Динамическое торможение — кинетическая энергия гасится на встроенном резисторе. Эффективно, но
требует расчёта мощности резистора и контроля температуры. - Рекуперативное торможение — энергия возвращается в сеть через активный фронтальный
преобразователь (AFE). Экономично, но дорого в реализации.
Для стандартных задач оптимален вариант 2 с настройкой времени торможения на 20–30% больше времени разгона.
Режим реверса в автоматизированных системах: блокировки и логика управления
В современных линиях режим реверса редко управляется вручную. Он интегрируется в алгоритмы ПЛК через промышленные
шины (Modbus, Profinet, Ethernet/IP). Ключевые требования к логике:
- Задержка между командой «Стоп» и «Реверс» не менее 0,5–2,0 сек (зависит от момента инерции);
- Контроль скорости: переключение разрешено только при n < 5–10% от номинала;
- Аварийная блокировка при превышении температуры двигателя, обрыве энкодера или потере связи;
- Аппаратное дублирование: внешние контакторы с механической блокировкой для мощностей >15 кВт.
Игнорирование этих правил приводит к «перепрограммированию» привода, ложным срабатываниям защит и ускоренному износу подшипниковых узлов.
Диагностика неисправностей цепи реверса: пошаговый алгоритм
Если привод не реагирует на команду смены направления или срабатывает защита:
- Проверьте питание цепи управления (24 В DC / 220 В AC) на дискретном входе ПЧ.
- Убедитесь, что параметр Reverse Enable активирован и не заблокирован паролем или внешним сигналом.
- Прозвоните кабель управления на обрыв и КЗ, проверьте затяжку клемм.
- Запустите двигатель в режиме «ручного управления» с панели ПЧ — если реверс работает, проблема во внешней схеме
или ПЛК. - Проверьте механику: заклинивание муфты, люфт в редукторе, состояние тормозных колодок.
- Снимите осциллограмму тока и скорости при переключении — анализ формы сигнала выявит скрытые проблемы с
настройкой ПИД-регулятора или временем торможения.
Нормативные требования и современные тенденции
Проектирование реверсивных приводов регламентируется ГОСТ Р МЭК 61800-5-1 (безопасность электроприводов), ПУЭ (глава 5.3) и отраслевыми стандартами. В 2024–2026 годах производители активно внедряют «умный реверс»: алгоритмы предиктивного контроля, которые автоматически адаптируют время торможения под текущую нагрузку, и IoT-модули для мониторинга циклов переключения в реальном времени. Это снижает аварийность на 40–60% и упрощает техническое обслуживание.
Заключение
Корректная настройка и эксплуатация реверсивного режима — фундамент надёжности электропривода. Независимо от типа двигателя или сложности автоматизации, соблюдение логики переключения, учёт инерционных нагрузок и регулярная диагностика цепи управления исключают 90% типичных аварий. При проектировании нестандартных систем с частыми реверсивными циклами рекомендуется обращаться к инженерам для расчёта динамических нагрузок, подбора тормозных модулей и интеграции с системами диспетчеризации.